개요
(해당 글은 초기 버전에 대한 것이고 다른 글에 새 버전으로 업데이트하였습니다.)
Muesli(뮤즐리) 알고리즘을 PyTorch 코드로 구현하였으며 Colab에서 코드 실행 및 결과 확인이 가능합니다.
설명
뮤즐리에서는 뮤제로의 후속 연구중 하나로 많은 연산량이 필요했던 뮤제로의 MCTS서치를 사용하지 않고 policy improvement가 가능한 알고리즘을 설명합니다. 알파고 제로부터 뮤제로까지 제로 계열 알고리즘에서는 업데이트 할 타겟을 MCTS서치 결과에 기반해 구성하는데, 이 과정에서 네트워크 inference가 많이 필요한 부분도 있고, 휴리스틱한 서치이다보니 왜 그런건지 완전한 이해가 되는 부분이 아니었습니다. 이에 대한 후속 연구(Monte-Carlo tree search as regularized policy optimization, Grill)로 제로 계열 알고리즘의 방식을 regularized policy optimization의 관점으로 보고 대체할 수 있음이 알려졌습니다.
뮤즐리는 위에서 설명한 연구의 아이디어가 뮤제로의 구조 위에 적용된 알고리즘입니다. Maximum a Posteriori Policy Optimization (MPO)에 기반한 업데이트 식을 사용하고, 여기에는 MCTS에서처럼 deep한 search를 사용하는 대신 one-step만 search한 값을 사용합니다.
네트워크의 전체적인 구조는 기본적으로 뮤제로와 동일하고, 논문에서는 IMPALA 스타일의 네트워크를 가지고도 실험을 진행하기도 합니다. 저는 뮤제로와 동일한 구조로 구현을 하였습니다.
논문에서 소개하는 policy loss는 아래와 같고 이에 대해 gradient descent 해야합니다. (direct method)

위 식은 논문에서의 target network(prior)로 부터 계산한 값으로 근사해서 구하는 advantage^를 policy가 나타내는 각 a에 대해 expectation을 구하는 식과, prior로부터 계산되는 policy_cmpo와 업데이트할 policy의 거리를 제한하기 위해 KL div를 사용하는 regularizer로 구성이 됩니다. 아래 식은 이에 사용되는 policy_cmpo입니다.
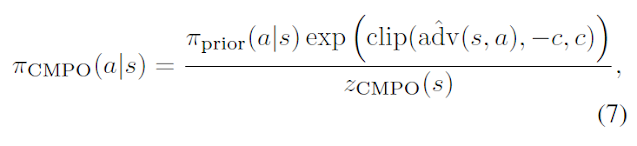

9번 식의 second term으로 11번 식을 사용할 수 있습니다.
 Exact KL 대신 위와 같은 식으로 regularizer를 샘플합니다. 여기서 선택되는 action들은 action space dim보다 작은 수로 랜덤샘플해서 사용이 가능합니다. large or continuous action spaces의 경우에 사용하기 유리한 부분입니다. 위 식에서 z_cmpo가 사용되는데 이는 아래의 12번 식입니다.
Exact KL 대신 위와 같은 식으로 regularizer를 샘플합니다. 여기서 선택되는 action들은 action space dim보다 작은 수로 랜덤샘플해서 사용이 가능합니다. large or continuous action spaces의 경우에 사용하기 유리한 부분입니다. 위 식에서 z_cmpo가 사용되는데 이는 아래의 12번 식입니다.

또한 model의 학습을 위해서 L_m도 사용이 되는데, 7번식의 policy_cmpo식을 사용해 구성한 확률분포와 업데이트할 네트워크의 policy 확률분포를 가지고 KL div식을 사용해 loss를 구성합니다. 이는 뮤제로에서 MCTS해서 얻은 확률분포를 업데이트할 네트워크가 타겟으로 삼는 것과 비슷하게 policy_cmpo의 확률분포를 타겟으로 삼게 합니다. 이는 policy에 대한 업데이트이지만 policy학습이 주 목적이기보다 policy inference 이전의 네트워크들(dynamics나 representation과 같은 encoder들)의 학습을 돕게끔 하는 것으로 보입니다.

위의 식들에서 사용되었던 advantage^는 q^ - v^으로 구하는데(target network로부터), q^은 아래의 식으로 구해집니다.(이 또한 target network로부터 inference)


아래는 실행 결과입니다.

Muesli (cartpole)

(다른 알고리즘 결과들)
다음 글에 구현된 코드와 함께 설명하는 글을 이어 작성하겠습니다.
아래는 전체 코드입니다.
import gym
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.distributions import Categorical
import matplotlib.pyplot as plt
import numpy as np
!pip install gym[classic_control]
!pip install gym[box2d] #for lunarlander
!apt update
!apt install xvfb
!pip install pyvirtualdisplay
!pip install gym-notebook-wrapper
import gnwrapper
!nvidia-smi
print(torch.cuda.is_available())
##########################
##Representation Network
##input : raw input
##output : hs(hidden state)
class Representation(nn.Module):
def __init__(self, input_dim, output_dim, width):
super().__init__()
self.layer1 = torch.nn.Linear(input_dim, width)
self.layer2 = torch.nn.Linear(width, width)
self.layer3 = torch.nn.Linear(width, output_dim)
def forward(self, x):
x = self.layer1(x)
x = torch.nn.functional.relu(x)
x = self.layer2(x)
x = torch.nn.functional.relu(x)
x = self.layer3(x)
return x
#######################
##Dynamics Network
##input : hs, action
##output : next_hs, reward
class Dynamics(nn.Module):
def __init__(self, input_dim, output_dim, width):
super().__init__()
self.layer1 = torch.nn.Linear(input_dim + 1, width)
self.layer2 = torch.nn.Linear(width, width)
self.hs_head = torch.nn.Linear(width, output_dim)
self.reward_head = torch.nn.Linear(width, 1)
def forward(self, x, action):
action = torch.tensor([action])
x = torch.cat((x,action), dim=0)
x = self.layer1(x)
x = torch.nn.functional.relu(x)
x = self.layer2(x)
x = torch.nn.functional.relu(x)
hs = self.hs_head(x)
reward = self.reward_head(x)
return hs, reward
######################
##Prediction Network
##input : hs
##output : P, V
class Prediction(nn.Module):
def __init__(self, input_dim, output_dim, width):
super().__init__()
self.layer1 = torch.nn.Linear(input_dim, width)
self.layer2 = torch.nn.Linear(width, width)
self.policy_head = torch.nn.Linear(width, output_dim)
self.value_head = torch.nn.Linear(width, 1)
def forward(self, x):
x = self.layer1(x)
x = torch.nn.functional.relu(x)
x = self.layer2(x)
x = torch.nn.functional.relu(x)
P = self.policy_head(x)
P = torch.nn.functional.softmax(P, dim=0)
V = self.value_head(x)
return P, V
#####################
##Target network
class Target(nn.Module):
def __init__(self, state_dim, action_dim, width, target=0):
super().__init__()
self.representation_network = Representation(state_dim, state_dim//2, width)
self.dynamics_network = Dynamics(state_dim//2, state_dim//2, width)
self.prediction_network = Prediction(state_dim//2, action_dim, width)
########################
##Muesli agent
class Agent(nn.Module):
def __init__(self, state_dim, action_dim, width, target=0):
super().__init__()
self.representation_network = Representation(state_dim, state_dim//2, width)
self.dynamics_network = Dynamics(state_dim//2, state_dim//2, width)
self.prediction_network = Prediction(state_dim//2, action_dim, width)
self.optimizer = torch.optim.AdamW(self.parameters(), lr=0.0003, weight_decay=0)
#self.scheduler = torch.optim.lr_scheduler.ExponentialLR(self.optimizer, gamma=0.999)
self.to(device)
self.train()
self.state_traj = []
self.action_traj = []
self.P_traj = []
self.r_traj = []
self.state_replay = []
self.action_replay = []
self.P_replay = []
self.r_replay = []
self.action_space = action_dim
self.env = gym.make(game_name)
def self_play_mu(self, max_timestep=10000):
#self play with 1st inferenced policy
game_score = 0
state = self.env.reset()
for i in range(max_timestep):
start_state = state
with torch.no_grad():
hs = self.representation_network(torch.from_numpy(state).float().to(device))
P, v = self.prediction_network(hs)
action = np.random.choice(np.arange(self.action_space), p=P.detach().numpy())
state, r, done, _ = self.env.step(action)
self.state_traj.append(start_state)
self.action_traj.append(action)
self.P_traj.append(P)
self.r_traj.append(r)
game_score += r
if done:
break
# for update inference over trajectory length
self.state_traj.append(np.zeros_like(state))
self.state_traj.append(np.zeros_like(state))
self.r_traj.append(torch.tensor(0))
self.action_traj.append(np.random.randint(self.action_space))
# traj append to replay
self.state_replay.append(self.state_traj)
self.action_replay.append(self.action_traj)
self.P_replay.append(self.P_traj)
self.r_replay.append(self.r_traj)
return game_score
def target_performence_test(self, target, max_timestep=10000):
## self play with 1st inferenced policy
game_score = 0
state = self.env.reset()
for i in range(max_timestep):
start_state = state
with torch.no_grad():
hs = target.representation_network(torch.from_numpy(state).float().to(device))
P, v = target.prediction_network(hs)
action = np.random.choice(np.arange(self.action_space), p=P.detach().numpy())
state, r, done, _ = self.env.step(action)
game_score += r
if done:
break
return game_score
def update_weights_mu(self, target):
for _ in range(20): ## number of minibatch
Cumul_L_total = 0
for epi_sel in range(6): ## number of selected episode in a batch
if(epi_sel>0):## replay proportion
sel = np.random.randint(0,len(self.state_replay))
self.state_traj = self.state_replay[sel]
self.action_traj = self.action_replay[sel]
self.P_traj = self.P_replay[sel]
self.r_traj = self.r_replay[sel]
## multi step return G (orignally retrace used)
G = 0
G_arr = []
for r in self.r_traj[::-1]:
G = 0.99 * G + r
G_arr.append(G)
G_arr.reverse()
G_arr.append(torch.tensor(0))
G_arr.append(torch.tensor(0))
for i in np.random.randint(len(self.state_traj)-2,size=5): ## number of selected transition in a replay
## update inference (2 step unroll. originally 5 step unroll recommended)
first_hs = self.representation_network(torch.from_numpy(self.state_traj[i]).float().to(device))## do not have to stack more than 1 frame
first_P, first_v = self.prediction_network(first_hs)
second_hs, r = self.dynamics_network(first_hs, self.action_traj[i])
second_P, second_v = self.prediction_network(second_hs)
third_hs, r2 = self.dynamics_network(second_hs, self.action_traj[i+1])
third_P, third_v = self.prediction_network(third_hs)
## target network inference
with torch.no_grad():
t_first_hs = target.representation_network(torch.from_numpy(self.state_traj[i]).float().to(device))
t_first_P, t_first_v = target.prediction_network(t_first_hs)
## L_pg_cmpo first term (eq.10)
importance_weight = torch.clip(first_P.gather(0,torch.tensor(self.action_traj[i]))
/(self.P_traj[i].gather(0,torch.tensor(self.action_traj[i])).item()),
0, 1
)
first_term = -1 * importance_weight * (G_arr[i].item() - t_first_v.item())
##lookahead inferences (one step look-ahead to some actions to estimate q_prior, from target network)
with torch.no_grad():
r1_arr = []
v1_arr = []
a1_arr = []
for _ in range(self.action_space): #sample <= N(action space), now N
action1 = np.random.choice(np.arange(self.action_space), p=t_first_P.detach().numpy())#prior pi
hs, r1 = target.dynamics_network(t_first_hs, action1)
_, v1 = target.prediction_network(hs)
r1_arr.append(r1)
v1_arr.append(v1)
a1_arr.append(action1)
## z_cmpo_arr (eq.12)
with torch.no_grad():
adv_arr = []
for r1, v1 in zip(r1_arr, v1_arr):
adv = r1 + 0.99 * v1 - t_first_v # adv = q_prior - v_prior. q_prior = r1 + gamma* v1
adv_arr.append(adv)
exp_clip_adv_arr = [torch.exp(torch.clip(adv_arr[k], -1, 1)) for k in range(self.action_space)]
z_cmpo_arr = []
for k in range(self.action_space):
z_cmpo = (1 + torch.sum(torch.tensor(exp_clip_adv_arr)) - exp_clip_adv_arr[k]) / self.action_space
z_cmpo_arr.append(z_cmpo)
## L_pg_cmpo second term (eq.11)
second_term = 0
for k in range(self.action_space):
second_term += exp_clip_adv_arr[k]/z_cmpo_arr[k] * torch.log(first_P.gather(0, torch.tensor(a1_arr[k])))
regularizer_multiplier = 5
second_term *= -1 * regularizer_multiplier / self.action_space
## L_pg_cmpo
L_pg_cmpo = first_term + second_term
## L_v
L_v = (
((first_v - G_arr[i].item())**2)/2
+ ((second_v - G_arr[i+1].item())**2)/2
+ ((third_v - G_arr[i+2].item())**2)/2
)
## L_r
L_r = ((r - self.r_traj[i])**2)/2 + ((r2-self.r_traj[i+1])**2)/2
## L_m (eq 7, eq 13)
L_m = 0
m_adv_arr = []
with torch.no_grad():
m_hs = target.representation_network(torch.from_numpy(self.state_traj[i+1]).float().to(device))
m_P, m_v = target.prediction_network(m_hs)
for j in range(self.action_space):
hs, r = target.dynamics_network(m_hs, j)
_, v = target.prediction_network(hs)
m_adv = r + 0.99 * v - m_v
m_adv_arr.append(torch.exp(torch.clip(m_adv,-1,1)))
pi_cmpo_all = [m_P[j]*m_adv_arr[j]/(1+sum(m_adv_arr)-m_adv_arr[j])*self.action_space for j in range(self.action_space)]
pi_cmpo_all=torch.tensor(pi_cmpo_all)
kl_loss = torch.nn.KLDivLoss()
L_m += kl_loss(F.log_softmax(second_P, dim=0), F.softmax(pi_cmpo_all,dim=0))#input, target
m_adv_arr = []
with torch.no_grad():
m_hs = target.representation_network(torch.from_numpy(self.state_traj[i+2]).float().to(device))
m_P, m_v = target.prediction_network(m_hs)
for j in range(self.action_space):
hs, r = target.dynamics_network(m_hs, j)
_, v = target.prediction_network(hs)
m_adv = r + 0.99 * v - m_v
m_adv_arr.append(torch.exp(torch.clip(m_adv,-1,1)))
pi_cmpo_all = [m_P[j]*m_adv_arr[j]/(1+sum(m_adv_arr)-m_adv_arr[j])*self.action_space for j in range(self.action_space)]
pi_cmpo_all=torch.tensor(pi_cmpo_all)
kl_loss = torch.nn.KLDivLoss()
L_m += kl_loss(F.log_softmax(third_P, dim=0) , F.softmax(pi_cmpo_all,dim=0))
L_m /= 2
L_total = L_pg_cmpo + L_v/3/4 + L_r/2 + L_m/4
Cumul_L_total += L_total
Cumul_L_total /= 30
self.optimizer.zero_grad()
Cumul_L_total.backward()
nn.utils.clip_grad_value_(self.parameters(), clip_value=1.0)
## dynamics network gradient scale 1/2
for d in self.dynamics_network.parameters():
d.grad *= 0.5
self.optimizer.step()
## target network(prior parameters) moving average update
alpha_target = 0.01
params1 = self.named_parameters()
params2 = target.named_parameters()
dict_params2 = dict(params2)
for name1, param1 in params1:
if name1 in dict_params2:
dict_params2[name1].data.copy_(alpha_target*param1.data + (1-alpha_target)*dict_params2[name1].data)
target.load_state_dict(dict_params2)
#self.scheduler.step()
##trajectory clear
self.state_traj.clear()
self.action_traj.clear()
self.P_traj.clear()
self.r_traj.clear()
return
device = torch.device('cpu')
score_arr = []
game_name = 'CartPole-v1'
env = gym.make(game_name)
target = Target(env.observation_space.shape[0], env.action_space.n, 128)
agent = Agent(env.observation_space.shape[0], env.action_space.n, 128)
print(agent)
env.close()
target.load_state_dict(agent.state_dict())
#Self play, weight update
episode_nums = 1000
for i in range(episode_nums):
if i%30==0:
params1 = agent.named_parameters()
params2 = target.named_parameters()
dict_params2 = dict(params2)
for name1, param1 in params1:
if name1 in dict_params2:
dict_params2[name1].data.copy_(0.5*param1.data + 0.5*dict_params2[name1].data)
target.load_state_dict(dict_params2)
game_score = agent.self_play_mu()
score_arr.append(game_score)
if i%10==0:
print('episode', i)
print('score', game_score)
t_game_score = agent.target_performence_test(target)
print('t_score', t_game_score)
if np.mean(np.array(score_arr[i-5:i])) > 400:
torch.save(agent.state_dict(), 'weights.pt')
break
agent.update_weights_mu(target)
torch.save(agent.state_dict(), 'weights.pt')
agent.env.close()
## Earned score per episode
plt.plot(score_arr, label ='score')
plt.legend(loc='upper left')
## game play video
agent.load_state_dict(torch.load("weights.pt"))
env = gnwrapper.LoopAnimation(gym.make(game_name))
state = env.reset()
for _ in range(100):
with torch.no_grad():
hs = agent.representation_network(torch.from_numpy(state).float().to(device))
P, v = agent.prediction_network(hs)
action = np.random.choice(np.arange(agent.action_space), p=P.detach().numpy())
env.render()
state, rew, done, _ = env.step(action.item())
if done:
state = env.reset()
env.display()






댓글
댓글 쓰기